

Build Season Week 6 – Final Week
 Week 6 was a hectic end to the build season. We were trying to decrease the weight of our robot, finalize functions of the robot, program the robot, troubleshoot electronics and hardware, and many more things. Fortunately, the students had Monday (February 21st) and Tuesday (February 22nd) off because of the midwinter break.
Week 6 was a hectic end to the build season. We were trying to decrease the weight of our robot, finalize functions of the robot, program the robot, troubleshoot electronics and hardware, and many more things. Fortunately, the students had Monday (February 21st) and Tuesday (February 22nd) off because of the midwinter break.
During the week and on Saturday, the Electronics & Controls Team finished wiring up the robot which allowed the Programming Team to finally start testing their code.
On Monday, during some testing and practicing we broke the part of the motor powering the vertical movement of our arm. We had to redesign what powered the arm. But, at this point we were still hovering right at 120lb. Several mentors and students stayed late Monday to finish placing the new sprocket and motor on as well as “cheese-hole” every possible part our robot to cut down on weight.
Tuesday afternoon brought about a very pleasant surprise-a 117.5lb robot. After much confusion over the variance in the weight of our robot amongst three different scales, we found that the robot had to be weighed on a solid surface such as concrete or wood instead of the carpet. Otherwise, we got a wide range of numbers for our weight.
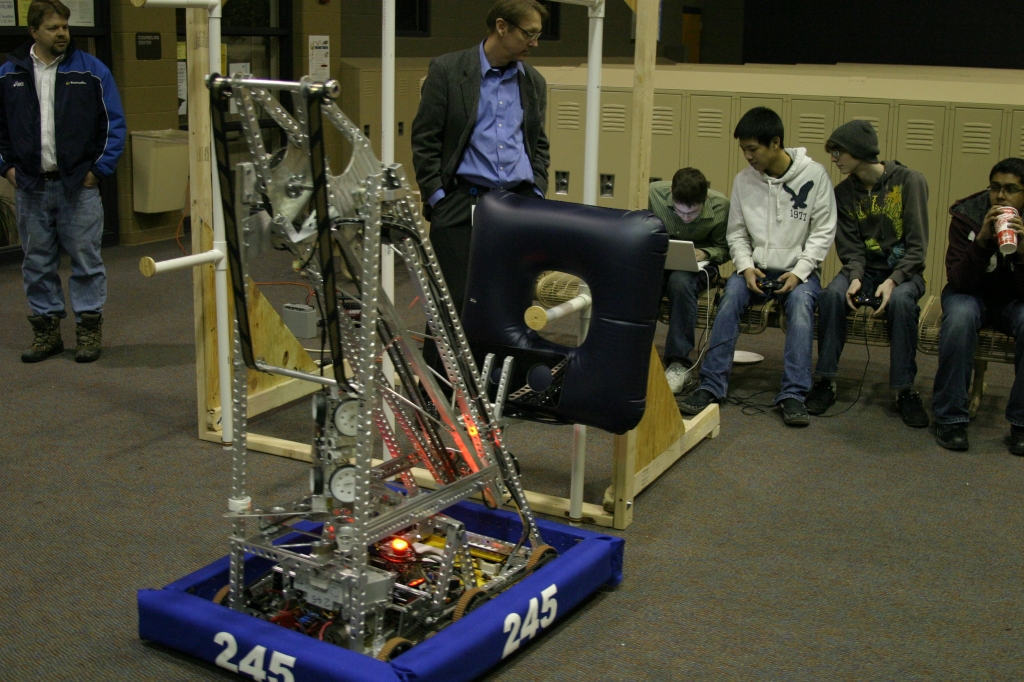
 The most important part of this week, though, was that we finished the robot and bagged a fully-functional robot. The Drive Team was able to practice several times Tuesday afternoon and night. The Programming Team was also able to test certain aspects of their autonomous mode and collect data to finish the autonomous.
The most important part of this week, though, was that we finished the robot and bagged a fully-functional robot. The Drive Team was able to practice several times Tuesday afternoon and night. The Programming Team was also able to test certain aspects of their autonomous mode and collect data to finish the autonomous.
- The Mechanism/Manipulator & Arm Team had to restructure part of the upper arm and replace the direct-drive motor system with a chain and sprocket.
- The Above Chassis Team fixed issues with deployment and minibot systems. During our testing we found that the minibot was getting caught on part of the deployment and was not leaving the big robot. After some troubleshooting, however, we were able to get it working perfectly.
- The Programming Team worked on the robot at different times on Saturday and then took it home Sunday to finish the teleoperated mode code and begin work on the autonomous. On Monday, the Drive Team tested the teleop mode code and it worked perfectly.
- The Controls & Electronics Team finished wiring and hooking up encoders, potentiometers, and line trackers during the week. However, on Monday, after the chain and sprocket were installed and the “cheese-holing” of the robot was complete, the Controls & Electronics Team had to rewire many parts of the robot.
- The Marketing & Website Team finalized the new pit design and placed colored duct tape on all the pieces of PVC. We also finalized the graphics for the side panels of the big robot, the polycarbonate body of the minibot, and the 3′ x 5′ banners of the pit. They are being printed and will be ready for the Alamo Regional.
- The Project Management Team finished the business plan and has begun organizing it for display in our pit. The Project Management Team is also meeting with the Drive Team and Pit Crew to discuss the business plan and talking to judges.
Related Media: Build Season – Week 6 and 2011 FIRST Robot
